MOBILE PHONE OPERATED BOT
OVERVIEW:
Today as the mobile phones are become very essential for everyone and has a vital use so to think about a mobile phone operated robot is an innovative idea. We can operate our robot from any distant or remote area. It is a wireless robot but instead of using a separate wireless module (transmitter and receiver) we are using the cell phones for this purpose. This robot has advantages over simple wireless bot as it overcomes the limitations of wireless like limited range, frequency interference etc. Mobile operated bot is having a wide range (service provider range), less fear of interference as every call is having a unique frequency and moreover it has more control keys (12 keys).The principle used for mobile controlled robot is the decoding of the DTMF tone. DTMF tone stands for dual-tone multi-frequency tone. During any call if a button is pressed, a tone corresponding to that button is generated and heard at the other end of the call. This tone is basically known as DTMF tone and these tones are standard one, fixed by IEEE, ISO, EIA, ITU etc.
CIRCUIT DESCRIPTION:

WORKING:
The mobile operated robot is having basically five main phases:
1. Make a call to mobile on robot.
2. Sending the signal generated by DTMF encoder in transmitter.
3. Receiving the signal by receiver.
4. Decode the signal with HT9170 decoder IC.
5. Process the decoded signal with on board processor ATmega16.
Firstly make a call from the remote phone to the phone attached to the robot and connect the receiving mobile phone with headset in auto answer mode. As the call is received, the connection is established between two. Now if you press a button then the DTMF tone generates a signal by adding the frequency corresponding to that button and sends to the receiver. Receiver detects it and sends it to HT9170 decoder IC which decodes the DTMF tone and fed the decoded signal to the microcontroller ATmega16 i.e. on board processor. According to the program in the microcontroller the robot starts moving.
In DTMF the tones and assignments are as follows:

The keys A,B,C,D are not available in the mobile phones as these keys are used to transmit some secret or confidential data. These keys are basically used in govt. and defense sector.
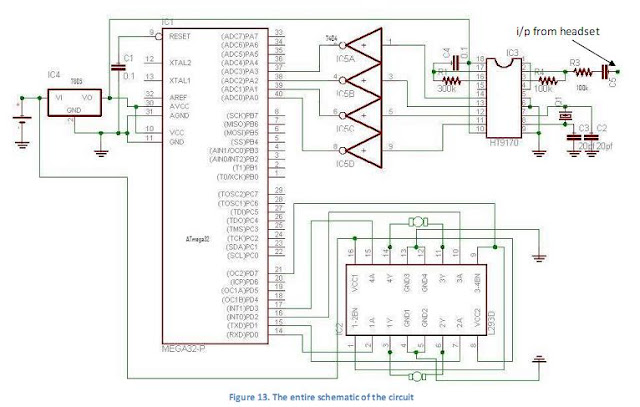
All type of HT9170 series use digital counting techniques to detect and decode all the 16 DTMF tone pair into 4-bit code output.

VP and VN are the dual i/p of the op-amp, GS is the output of op-amp. When input signals given at pin1 and pin2 found to be effective then DV(pin15) becomes high, the correct 4- bit code of tone is transferred to the output pins D0-D3. The decoded digital data is then negated using 4 NOR gates of 7404 HEX INVERTER. This inverted input will be given to Port A of microcontroller. The microcontroller is programmed to give output at Port D,to control the motor driver. As the microcontroller is not able to drive the motor so a motor driver IC L293D is used for this purpose.

OVERVIEW:
Today as the mobile phones are become very essential for everyone and has a vital use so to think about a mobile phone operated robot is an innovative idea. We can operate our robot from any distant or remote area. It is a wireless robot but instead of using a separate wireless module (transmitter and receiver) we are using the cell phones for this purpose. This robot has advantages over simple wireless bot as it overcomes the limitations of wireless like limited range, frequency interference etc. Mobile operated bot is having a wide range (service provider range), less fear of interference as every call is having a unique frequency and moreover it has more control keys (12 keys).The principle used for mobile controlled robot is the decoding of the DTMF tone. DTMF tone stands for dual-tone multi-frequency tone. During any call if a button is pressed, a tone corresponding to that button is generated and heard at the other end of the call. This tone is basically known as DTMF tone and these tones are standard one, fixed by IEEE, ISO, EIA, ITU etc.
CIRCUIT DESCRIPTION:

WORKING:
The mobile operated robot is having basically five main phases:
1. Make a call to mobile on robot.
2. Sending the signal generated by DTMF encoder in transmitter.
3. Receiving the signal by receiver.
4. Decode the signal with HT9170 decoder IC.
5. Process the decoded signal with on board processor ATmega16.
Firstly make a call from the remote phone to the phone attached to the robot and connect the receiving mobile phone with headset in auto answer mode. As the call is received, the connection is established between two. Now if you press a button then the DTMF tone generates a signal by adding the frequency corresponding to that button and sends to the receiver. Receiver detects it and sends it to HT9170 decoder IC which decodes the DTMF tone and fed the decoded signal to the microcontroller ATmega16 i.e. on board processor. According to the program in the microcontroller the robot starts moving.
In DTMF the tones and assignments are as follows:

The keys A,B,C,D are not available in the mobile phones as these keys are used to transmit some secret or confidential data. These keys are basically used in govt. and defense sector.
All type of HT9170 series use digital counting techniques to detect and decode all the 16 DTMF tone pair into 4-bit code output.
VP and VN are the dual i/p of the op-amp, GS is the output of op-amp. When input signals given at pin1 and pin2 found to be effective then DV(pin15) becomes high, the correct 4- bit code of tone is transferred to the output pins D0-D3. The decoded digital data is then negated using 4 NOR gates of 7404 HEX INVERTER. This inverted input will be given to Port A of microcontroller. The microcontroller is programmed to give output at Port D,to control the motor driver. As the microcontroller is not able to drive the motor so a motor driver IC L293D is used for this purpose.


hi bro can u please send the documentation of this project as iam doing the same project..plzzz send it to kiran.sai1768@gmail.com...hoping a positive reply from u...plzzz...
ReplyDeletethanks,
kamal
I am sorry kamal that till this time I cudnt send you the documentation as I was not in a condition to operate my blog....I saw your comment today only....I think now its too late but still mailing it in the hope that it might help you further....You can directly contact me on the mail id I am mailing from as I check it daily...and please check your mail as I have mailed it
ReplyDeleteThis blog is really helpful to deliver updated affairs over internet which is really appraisable. NBN internet
ReplyDelete